| |
||||||||||||||||||||||
| a | ||||||||||||||||||||||
ASEMAR
Autonomous unmanned vehicle for maritime surveillance and security |
||||||||||||||||||||||
 |
||||||||||||||||||||||
| |
||||||||||||||||||||||
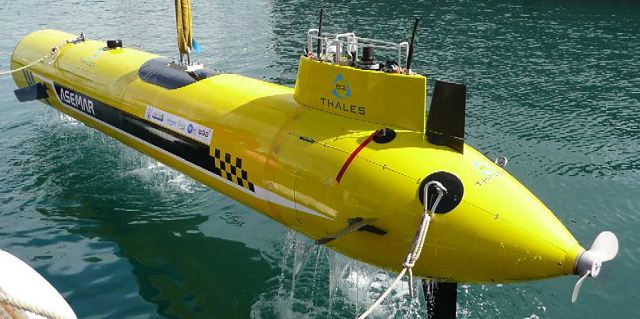
The
ASEMAR autonomous unmanned vehicle for maritime surveillance and security
is a project funded by the General Directorate for Enterprises (DGE)
in France and involves several partners. The two main companies are
Thales and ECA ROBOTICS and four educational institutions, ENSIETA,
Ecole Navale, AMURE and ISEN. Thales is responsible for the overall
project coordination, the high resolution sonar sensor and associated
on-board intelligence processing, as well as the system deployment.
ECA ROBOTICS is in charge of the design of the autonomous underwater
vehicle itself and all aspects linked directly to the navigation, autonomous
behavior and communications. This innovative AUV (Autnomous Underwater
Vehicle) will feature high levels of decision-making autonomy, generation
of high-resolution underwater imagery from depth and compatibility with
standard off-the-shelf equipment. The system will also have the capability
to track changes in the undersea environment between subsequent missions
and compare the objects it detects with those stored in its database.
Sea trials have been conducted from beginning of 2010 until end of April
2010, at first in the South of France, near Toulon, to validate the
behavior of the vehicle and its components in various conditions, and
then in the West of France, near Brest, to validate the sonar performance
when integrated in the vehicle and the global system performances. During
these sea trials, the AUV has demonstrated its capacity to perform large
missions in full autonomy. The advanced technologies developed in this
ASEMAR project have allowed to perform at sea the demonstration of an
autonomous underwater vehicle able to perform surveillance missions
over large areas, with a high level of performance thanks to its high
level of autonomy. |
||||||||||||||||||||||
| Technical Data | ||||||||||||||||||||||
| Design | ||||||||||||||||||||||
The
main components of the ASEMAR AUV are the embedded intelligence, the
sonar payload, the navigation function and the vehicle. |
||||||||||||||||||||||
| Mobilty | ||||||||||||||||||||||
The
ASEMAR has a cylindrical aluminum shape, a single propeller for an optimized
autonomy. The energy is provided by a lithium-Ion embedded battery. |
||||||||||||||||||||||
| Accessories | ||||||||||||||||||||||
The
main components of the ASEMAR are the embedded intelligence, the sonar
payload, the navigation function and the vehicle. The ASEMAR may communicate
with the surface ship through an acoustic link; sonar and navigation
data are recorded on board the AUV. To secure its main capabilities,
the ASEMAR AUV takes benefit of efficient functions and sub-systems.
THALES has developed a challenging on board processing that will perform
automatic target recognition and determine adaptive behaviour as part
of the mission management. |
||||||||||||||||||||||
| Mission | ||||||||||||||||||||||
The
mission of the ASEMAR is the detection of the immersed dangers. Its
spectrum of use is very wide: from the search of sunk ships or cargoes
of hazardous or polluting materials lost offshore, to the observation
of seismic faults or geologic movements. The ASEMAR has the ability
to operate in an unknown area and can detect, classify and localize
suspicious objects laying on the sea-bed. To perform its missions, the
ASEMAR is equipped with high resolution sonar linked to one operation
centre container for mission supervision and data processing. One container
is used for the transportation, storage and maintenance. |
||||||||||||||||||||||
| Specifications | ||||||||||||||||||||||
|
||||||||||||||||||||||
|
||||||||||||||||||||||
|
||||||||||||||||||||||
Asemar Thales AUV Autonomous Underwater unmanned vehicle technical data sheet specifications information description pictures photos images video intelligence identification Thales France French navy maritime naval defence industry technology
- Posted On