 The surrogate vessel upon which testing was just completed. Picture: Leidos |
|||
Controlled
only by the autonomy system, and with only a navigational chart of the
area loaded into its memory and inputs from its commercial-off-the-shelf
(COTS) radars, the surrogate vessel successfully sailed the complicated
inshore environment of the Gulf Intracoastal Waterway. During its voyage
of 35 nautical miles, the maritime autonomy system functioned as designed.
The boat avoided all obstacles, buoys, land, shoal water, and other vessels
in the area – all without any preplanned waypoints or human intervention.
While Leidos continues to use the surrogate vessel to test ACTUV software and sensors, the company is continuing construction of Sea Hunter, the first ACTUV prototype vessel, in Clackamas, Oregon. Sea Hunter is scheduled to launch in late fall 2015 and begin testing in the Columbia River shortly thereafter. |
|||
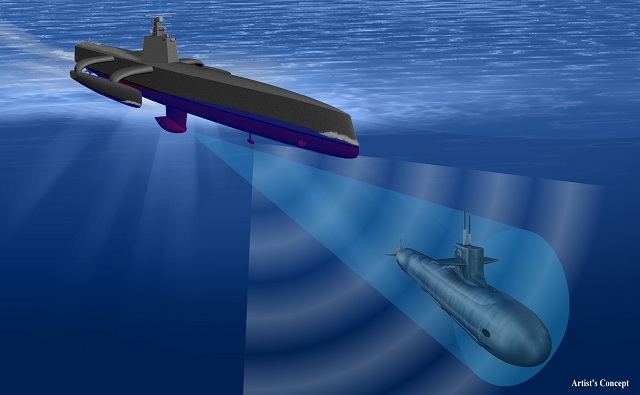
 Anti-Submarine Warfare Continuous Trail Unmanned Vessel (ACTUV). Picture: Leidos |
|||
Leidos Prototype Maritime Autonomy System for future ACTUV Completes First Self-Guided Voyage
- Posted On