

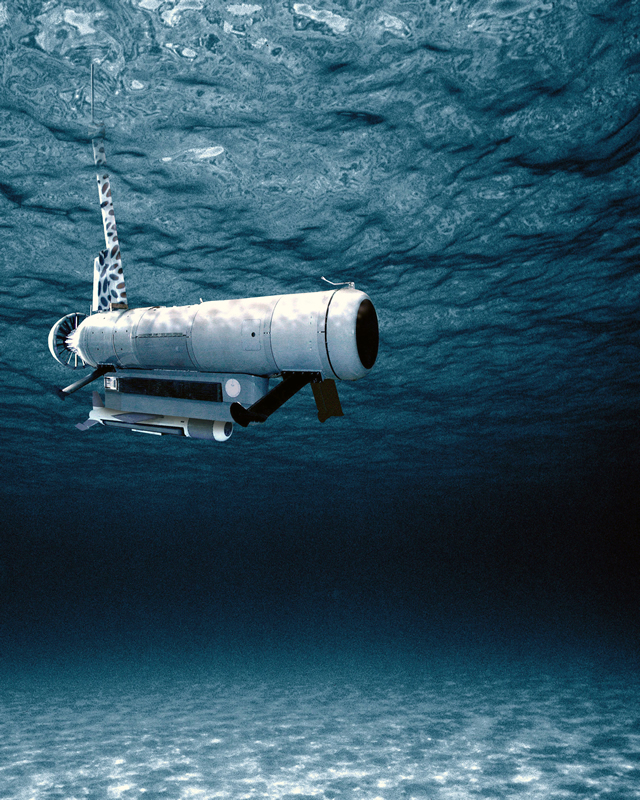
 The Remote Minehunting System (RMS) is an organic, off-board mine reconnaissance system that will offer carrier battle group ships an effective defense against mines by using an unmanned remote vehicle. RMS is being designed for installation aboard Arleigh Burke-class destroyers. Current plans call for RMS to be first installed aboard the destroyer Pinckney (DDG 91) in 2004. U.S. Navy photo courtesy of Lockheed Martin. |
|||
"At
some point during development, a system will go through what is called
a Maintainability Demonstration (M-Demo)," said Peter Halvorson,
Lead for Integrated Logistics Support at NSWC Panama City. "It is
an event where failures are intentionally introduced into the system to
see if trained Sailors can use the written repair procedures (technical
manuals) to fix it. This proves out the quality of both training and technical
documentation. We're taking this a step further for the LCS MCM MP. We
are starting our event with the process leading up to the repair - who
gets called, what forms/documentation are filed electronically to alert
someone that there is a failure, etc." Halvorson said a "reach back" process was added to the event, so that if trained Sailors are unable to fix the problem with the technical procedures provided, they are trained to "reach back" into the support infrastructure, typically the Mission Package Support Facility or an In-Service Engineering Agent, and ask for an extra level of expertise to help troubleshoot and fix the failed component. |
|||
U.S. Navy's LCS MCM Mission Package Takes another Step Toward Fleet Implementation
- Posted On